El desarrollo de sistemas autónomos para la industria agrícola se está convirtiendo cada vez en una tarea más importante, especialmente debido a la creciente demanda de productos agrícolas de calidad y la disponibilidad de mano de obra en constante disminución en las zonas agrícolas rurales, (Liu y Wu, 2014). Los tractores guiados automáticamente son tractores convencionales que se encuentran equipados con sistemas de navegación GPS, sensores y actuadores que permiten programar su trayectoria. El progreso en la tecnología de posicionamiento permitió el diseño de nuevos sistemas agrícolas, que van desde simples ayudas a la navegación hasta los robots de campo totalmente automatizados (Erhl et al., 2004). El potencial para la automatización de vehículos agrícolas en América del Norte se ha incrementado por el impulso de la agricultura de precisión. Los sistemas de guiado automático han ayudado en proporcionar información sobre la posición del vehículo agrícola para realizar las labores de cultivo. Se puede decir que es una herramienta importante (Reid et al., 2000). En Europa, el nivel de adopción de los sistemas de guiado ha ido en incremento, la principal ventaja es la eficiencia en la mano de obra, además de la facilidad de acoplar el sistema de guiado en los tractores. En Japón, la investigación en las Universidades se ha concentrado en metodologías, como la navegación, detección, y la aplicación de la teoría de control (Torii, 2000). La dirección automática tiene numerosas ventajas como rastrear las rutas, aprovechar el ancho máximo de trabajo y reducir los traslapes (Holpp et al., 2013).
Según diversos autores, con la dirección automática se puede lograr incrementos en la productividad, ahorros en insumos y seguridad en las actividades (Ming et al., 2009; Reid et al., 2000; Tillett, 1991), además de reducir el número de horas de funcionamiento de un tractor al realizar labores precisas, y reducir la emisión de residuos tóxicos producto de la combustión (Pedersenet al., 2005).
Los sistemas de posicionamiento geográfico (GPS) aplicados al sistema de dirección ubican en tiempo real las coordenadas exactas de un cuerpo rígido y con el uso de sistemas de control y actuadores dirige el tractor sobre la trayectoria planeada (Tillett, 1991). Sin embargo a pesar de las ventajas de estos sistemas se dependen en gran medida de los sistemas de geo-referencia y su constelación y de la posición de los satélites, por tanto es importante contar con correcciones diferenciales (Ming et al., 2009; Gan-Mor et al., 2007). Debido a la necesidad de contar con estas correcciones de posición que de manera inicial presentan errores, se requiere de manera auxiliar un sistema de corrección diferencial, DGPS, ( Differential Global PositioningSystem), que nos permite tener en tiempo real la posición con error mínimo del vehículo en el campo. Para Norteamérica existe el sistema de corrección diferencial WAAS (Wide AreaAugmentationSystem) de manera gratuita basado en satélites que obtienen con mucha precisión las coordenadas del objetivo en cuestión, el sistema RTK (Real Time Kinematic) es una técnica de corrección diferencial que requiere la colocación de una estación en el lugar de estudio, a diferencia del sistema Omnistar ® que usa satélites geoestacionarios para realizar la corrección en la posición.
Los objetivos del presente trabajo son obtener los valores de error lateral de la trayectoria en campo del tractor MF 592T, con el sistema de guiado semiautomático EZ Steer 250 instalado sobre la dirección.
Para la realización de la presente investigación se empleó un Tractor MaseyFergusson 592 Turbo, un Equipo EZ-Steer guide 250 de Trimble ®, en una parcela de 120x120 m (1,44 ha), cinta métrica, cal, cronómetro y caja de herramienta.
El tractor empleado en el presente estudio es un tractor moderno con motor ecológico TIER II 1104C-44T, versión 4WD, cubriendo los requerimientos de tracción dentro de este rango de potencia. Tractor turbocargado y su tanque de combustible tiene una capacidad de 100 L, posee también, un tablero análogo/digital. Con transmisión de uso rudo (HD) con 12 velocidades al frente y 4 de reversa, pudiendo utilizar este equipo en la mayoría de labores, tanto de preparación como de cultivo. Su sistema de dirección es tipo hidrostática balanceada, con bomba de engranes. Posee un sistema eléctrico de 12 volts y alternador de 55 amperes. El sistema de guiado para las pruebas de campo se compone por una pantalla con barra de luces, controlador de dirección, motor eléctrico instalado en el volante y dos antenas Marca Trimble®; una de bajo perfil y baja precisión sin corrección diferencial en México, y otra antena-receptor AGGPs 252 que permite obtener señal de corrección Omnistar XP®. (Figura 1).

Se realizaron pruebas del sistema de guiado en el campo experimental “Las Texas” del Departamento de Ingeniería Mecánica Agrícola (DIMA) de la Universidad Autónoma Chapingo, ubicado en las coordenadas 19° 49’ N y 98° 89’ W, a 2250 msnm, con una media de 6 satélites, rango de giro vertical de 0,45º y un tiempo de corrección de 2s en donde se empleó la corrección diferencial. Lo anterior debido a que entre mayor sea el tiempo de corrección los errores de posicionamiento se incrementan.
Se instaló el sistema de guiado en el tractor, se calibró y se realizaron pruebas preliminares. Se trazó una línea definida AB con ayuda del sistema de corrección y se midió el error de la trayectoria seguida respecto al centro de gravedad configurado en el sistema de medición. Se realizó una trayectoria a través de 120 m de distancia en línea recta AB (tratamiento testigo T0), establecida como referencia. La desviación que se presenta en el ensayo corresponde al desplazamiento del tractor hacia un lado o hacia el otro de la línea establecida, la cual fue identificada como positiva hacia el oeste y negativa hacia el este. En todos los tratamientos se inició la medición de datos después de 10 m de iniciada la labor, para garantizar el geo-posicionamiento el tractor agrícola y encontrar la trayectoria propuesta, por tal motivo la mayoría de las trayectorias no iniciaron en el origen. Para el caso de los tratamientos cuya variable es corrección diferencial desactivada, se sustituyó la antena empleada con DGPS por otra antena que solo recibe señales tipo WASS de bajo perfil. Se realizaron tres recorridos por cada tratamiento. Una vez realizado este proceso se analizaron estadísticamente los errores obtenidos.
El diseño empleado para el análisis de los datos fue un arreglo factorial 3x2x2x2, donde los factores estudiados fueron la velocidad de avance (V1=5 kmˑh-1, V2=7 kmˑh-1, V3=9 kmˑh-1), corrección diferencial activada (A) y desactivada (D), trayectoria lineal (l) y en pivote central (p), tipo de guiado Ez-Steer 250® (Ez) y barra de luces (Bl). Se trabajó un total de 24 tratamientos con 3 repeticiones, los resultados obtenidos fueron analizados estadísticamente con el programa SAS® versión educativa. También se realizaron pruebas de Tukey con α=0,05. Considerando los factores de velocidad, tipo de corrección, trayectoria y sistema de guiado con sus diferentes niveles.
La Figura 2 muestra las desviaciones o errores promedio en los 24 tratamientos estudiados, se observa que los tratamientos T1V1-A-l-Ez, T2V1-A-l-Bl, T3 V1-A-p-Ez, T4 V1-A-p-Bl que se caracterizan por tener señal de corrección diferencial para los dos tipos de trayectorias y ambos sistemas de guiado reportan medias que oscilan entre 2,20 y 7,85 cm, que según el Análisis de Varianza con un α=0,05 no existen diferencia significativas entre éstas. Esto coincide con Benson et al., (1998) quienes obtuvieron errores menores a 1 cm a velocidades de avance de 4 km∙h-1. Aun cuando no existen diferencias estadísticas, el tratamiento T3 V1-A-p-Ez con una desviación media de 7,85 cm es el de mayor valor del error con relación al grupo. Este tratamiento corresponde a una combinación de trayectoria en pivote con motor eléctrico accionando el volante, cuyo resultado coincide con Qiu et al., (1999), quienes mencionan que los sistemas de guiado automático con actuadores basados en partes mecánicas son efectivos a velocidades de 10 km∙h-1, este estudio fue aplicado en cultivos de maíz.
Con respecto a los tratamientos T5V1-D-l-Ez, T6V1-D-l-Bl, T7 V1-D-p-Ez, T8 V1-D-p-Bl, cuyas medias de error en la trayectoria oscilan de 21,74 a 23,05 cm, no existen diferencias significativas, pero si presentan diferencias significativas si son comparados diferenciados con los primeros 4 tratamientos. Tienen como principal característica que la señal de posición no usa la corrección diferencial, como sucede en el primer bloque de tratamientos. Estos tratamientos tuvieron valores superiores y coinciden con lo reportado por Stombaugh et al., (1998) quienes obtuvieron errores laterales de 4,5 a16 cm al buscar la mejor posición de la antena receptora. Lipinski, et al (2016) evaluó un sistema de guiado automático con corrección de libre acceso con una precisión de dirección de ± 230 mm y con corrección diferenciada con precisión de dirección de ± 50 mm, midiendo en intervalos de 10m la precisión de dichos sistemas, reportando errores de 3.8 y 3.6, así como desviaciones estándar de 905 mm y de 253 mm para los sistemas con corrección libre y diferenciada respectivamente.
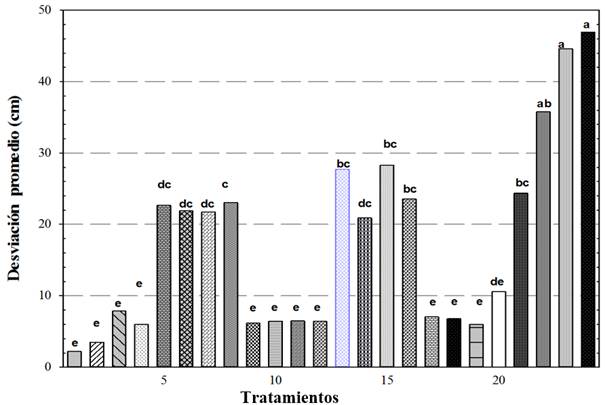
Por otra parte, de los tratamientos T9V2-A-l-Ez, T10 V2-A-l-Bl, T11 V2-A-p-Ez, T12 V2-A-p-Bl, cuya principal diferencia es el tipo de trayectoria a velocidades de 7 km∙h-1con corrección diferencial activada, reporta medias de las desviaciones del rango de 6,18 a 6,47 cm, y se observa de acuerdo a la significancia estadística, que cualquier combinación en trayectoria y sistema de guiado a seguir no influye, siempre y cuando se realice la corrección diferencial. Estos promedios de las desviaciones están por debajo de los obtenidos por Van (1999), quien reportó errores de ± 12 cm con un tractor circulando en 50 m en una trayectoria establecida.
Los tratamientos T13V2-D-l-Ez, T14V2-D-l-Bl, T15 V2-D-p-Ez, T16V2-D-p-Bl, comprenden el bloque cuya velocidad es de 7 km∙h-1 sin corrección diferencial y combinando tipos de trayectoria con sistema de guiado. Durante estos recorridos se obtuvieron errores máximos hasta 60 cm. Los tratamientos T14V2-D-l-Bl T16V2-D-p-Bl reportan las medias más bajas en errores, esto se debe a que coinciden en el sistema de guiado (barra de luces) y tienen como actuador a un operador en función de las luces que puede corregir la trayectoria de forma instintiva. Estos tratamientos no son estadísticamente diferentes entre sí.
Para los tratamientos T17V3-A-l-Ez, T18 V3-A-l-Bl, T19 V3-A-p-Ez, T20V3-A-p-Bl presentaron medias de las desviaciones entre 6,0 y 10,57 cm. Si consideramos la velocidad como factor decisivo en la realización de las labores agrícolas y comparamos estos tratamientos contra T9 V2-Ha-l-Ez, T10 V2-Ha-l-Bl, T11 V2-Ha-p-E y T12 V2-Ha-p-Bl, cuyas medias de desviaciones son de 6,18-6,47cm; se observa que el error aumenta al aumentar la velocidad.
Los tratamientos T21V3-D-l-Ez, T22 V3-D-l-Bl, T23 V3-D-p-Ez, T24 V3-D-p-Bl, cuya característica es que no usan la corrección diferencial, reportan diferencias significativas con medias de 24,38 a 46,93 cm. En este bloque de tratamientos se obtuvieron errores en algunas repeticiones de los tratamientos de hasta 90 cm, por debajo de lo que reporta Zhang et al., (1999) quienes obtuvieron errores máximos de hasta 1,56 m en las trayectorias de un tractor a velocidades de 4,0 a 6,4 km∙h-1 en ángulos de giro de ± 20°. Tales errores ocurrían justo cuando el tractor circulaba por una curva al dar la vuelta al final del recorrido en línea recta. Sin embargo, los resultados que reporta Zang et al., (1999) coinciden en las trayectorias lineales donde se obtuvieron errores máximos de 60 cm.
La diferencia del error promedio entre las trayectorias caracterizadas con los sistemas de guiado Ez-steer® y barra de luces es de 20 cm aproximadamente; se observa que para la misma velocidad de 5 km∙h-1 no existe diferencia significativa al utilizar cualquiera de los dos tipos de sistema guiado considerados. El valor promedio del error observado para el tratamiento T1 se encuentra por abajo de lo reportado por Inoueet al., (1997) para un sistema de corrección diferencial. En los gráficos, que se muestran a continuación, cada punto representa la media de 3 observaciones y la barra la desviación estándar.
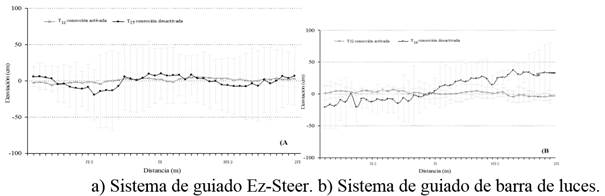
La Figura 3, muestra la trayectoria seguida por el conjunto agrícola durante una trayectoria lineal, la media del error para el tratamiento T1 y T2 fueron de 2,2 cm y 3,5cm respectivamente, contra medias de 22,69cm y 21,8cm en tratamientos T5 y T6
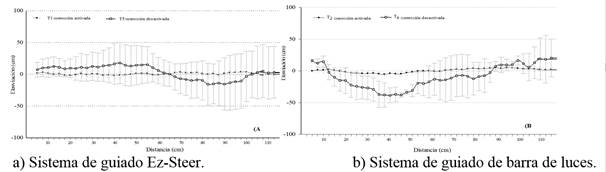
Los tratamientos T5 y T6 cuyas medias son 22,69 y 21,89 cm corresponden a tratamientos sin corrección únicamente empleando la posición de los satélites del GPS.
Goense (2003) reporta que los sistemas de guiado automático pueden trabajar durante todo el día sin problemas, por lo que en situaciones de trabajos nocturnos y condiciones extremas como neblina o polvo es factible realizar las labores agrícolas con la combinación propuesta en este tratamiento.
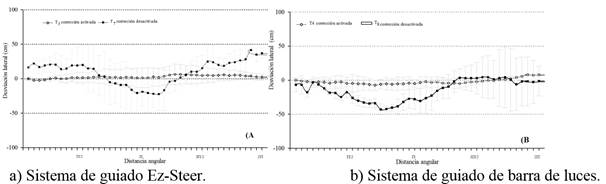
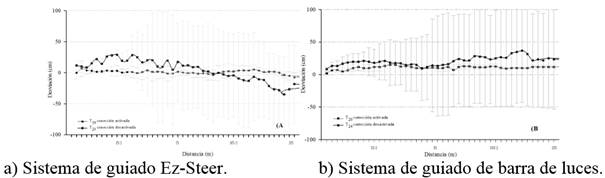
Para la prueba de trayectoria en pivote, se realizó una trayectoria o vuelta inicial como prueba para permitir que el tipo de trayectoria se acoplara al sistema, razón por la cual en algunos tratamientos el inicio corresponde a valores diferentes a lo establecido al origen. Se puede apreciar en la Figura 4 que los tratamientos T3 y T4 reportan medias de desviaciones de 7,85 y 6,01cm contra 21,74 y 23,05 cm de los tratamientos T7 y T8, lo que hace evidente apreciar la precisión que se logra al usar el sistema de corrección en el guiado. Los promedios de error obtenidos para estos tratamientos se encuentran dentro de lo reportado por Stombaugth et al., (1998), quienes indican errores laterales de 16 cm para velocidades de 16 km∙h-1. Por lo tanto, la magnitud del error o desviación lateral es proporcional a la velocidad de trabajo.
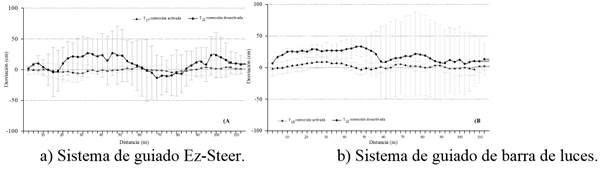
Las Figuras 5 y 6 corresponden a las combinaciones de trayectorias lineales y en pivote con corrección y sin corrección realizadas a una velocidad de 7 km∙h-1. Se puede observar que no existe diferencia estadística significativa (P≤0,05) que permita diferenciar entre la velocidad de 5 o 7 km∙h-1, cabe mencionar que los tratamientos a los que se hace referencia reportan los valores de desviación estándar mayores para la trayectoria sin corrección, esto se debe a que la precisión que se logra con los sistemas GPS dependen en gran medida de la cantidad de satélites, y éstos a su vez de la posición geográfica y la hora del día.
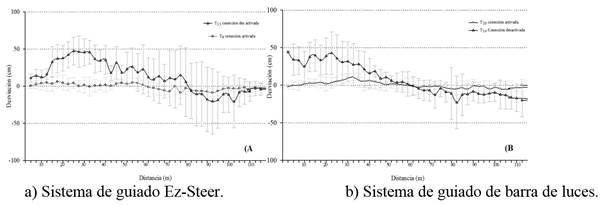
La Figura 7 muestra el comportamiento en una trayectoria lineal del tractor agrícola a una velocidad de 9 km∙h-1 con los dos sistemas de guiado considerados y utilizando corrección diferencial y sin ella. La velocidad es el factor característico de los tratamientos T17 al T24, con una velocidad de 9km∙h-1. Se observa que para los tratamientos T17 y T18 cuyas medias de las desviaciones son de 6,79 y 7,03 cm respectivamente, están dentro de los rangos permitidos para que no causen daños a los cultivos según Abidine (2002), no así para los tratamientos T21 y T22 cuyas medias de desviación lateral son de 24,38 y 35,78 cm.
Al comparar los tratamientos T19-T20 y T23-T24 en la Figura 8, se observa que la distancia angular recorrida por la trayectoria en pivote muestra errores máximos de desviación lateral hasta de 90 cm para los tratamientos que no tienen corrección diferencial. La desviación lateral media del tratamiento T24 fue de 46,93 cm con valores inferiores a lo que reportan Tyrelet al., (2006), los cuales son de 60 y 10 cm con los sistemas de corrección WASS y RTK, respectivamente.
Con un P≤0,05, no existen diferencias significativas entre los tratamientos con velocidades de 5 y 7 km∙h-1, pero a velocidades de 9 km∙h-1 reportan diferencias con respecto a los dos anteriores, lo que indica que durante el primer rango de velocidades, los errores no son considerables en la trayectoria por lo que ambas se pueden emplear para las labores agrícolas.
Los resultados obtenidos en las trayectorias realizadas con el tractor MasseyFerguson 592T muestran que el uso del sistema de guiado EZ-Steer® en trayectoria lineal y con un sistema de corrección diferencial, reporta errores promedio de 2,2 cm sobre la trayectoria predeterminada (tratamiento testigo). Este error encontrado permite realizar las labores agrícolas necesarias para la producción, desde la preparación del terreno hasta la cosecha sin que el error observado interfiera sobre el producto esperado, o se dejen áreas sin aprovechar. Cabe mencionar que dicho error representa menos del 1% de la superficie que se destine a alguna labor agrícola.
Las características de las trayectorias obtenidas en campo mostraron que los errores o desviaciones laterales en la trayectoria lineal aumentaron de 4 hasta 10 cm al cambiar la velocidad de 5 a 9 km∙h-1; y para el caso de la trayectoria en pivote central las desviaciones laterales variaron de 6 hasta 15 cm, sin diferencias significativas estadísticamente (P≤0,05).
Los tratamientos que corresponden a las trayectorias sin corrección diferencial presentaron errores de hasta 90 cm, encontrando diferencias significativas con el tratamiento testigo sin implemento agrícola (P≤0,05). Se encontró una trayectoria óptima con un error de 7,5 cm cuando el tractor circula a velocidades de 5 km∙h-1 con implemento agrícola, con relación al tratamiento testigo.
Se recomienda que las labores se hagan con velocidades menores a 7 km∙h-1, lo que permitirá que el error se reduzca en comparación con velocidades superiores a lo señalado, logrando su disminución aún más si se opera en trayectorias lineales.